Encender y apagar un LED
Autor: dongoul
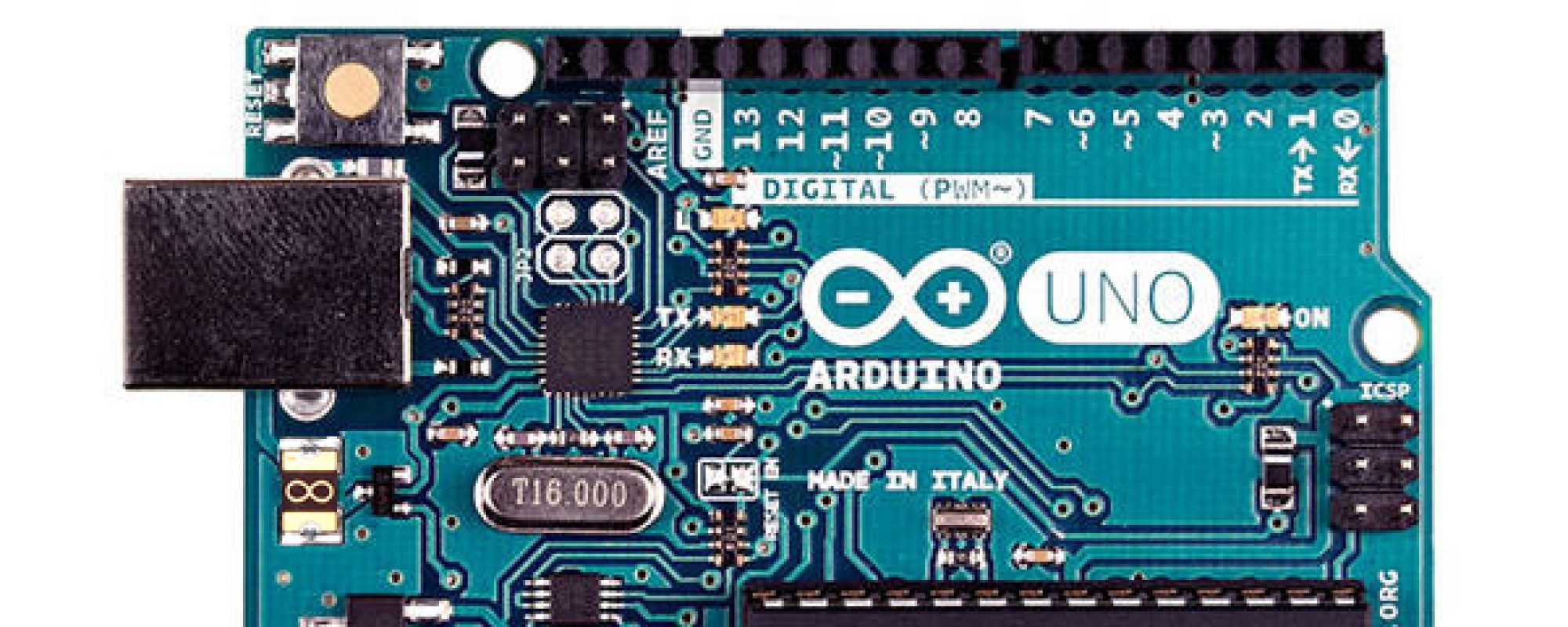
Partes de un Arduino
Componentes arduino uno
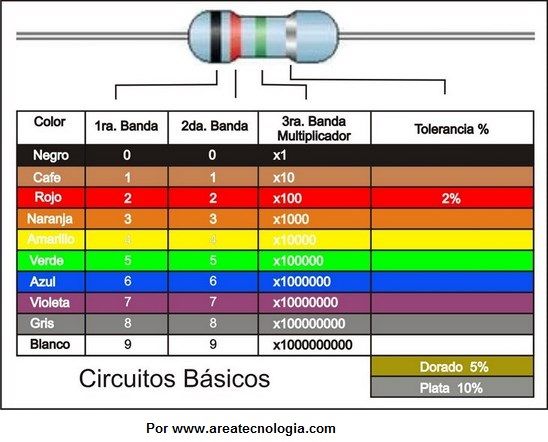
-Una resistencia es un componente que ofrecen oposición al paso de la corriente eléctrica.
Las resistencias tienen un código para determinar su valor. Se miden en ohmnios.
-Diodos LED: El LED (Light-Emitting Diode: Diodo Emisor de Luz), es un dispositivo semiconductor que emite luz incoherente de espectro reducido cuando se polariza de forma directa la unión PN en la cual circula por él una corriente eléctrica . Este fenómeno es una forma de electroluminiscencia, el LED es un tipo especial de diodo que trabaja como un diodo común, pero que al ser atravesado por la corriente eléctrica, emite luz.

-Capacitores: Se trata de un sistema compuesto por dos conductores: materiales capaces de conducir la electricidad (la fuerza originada por el rechazo y la atracción de partículas cargadas). En el caso de los capacitores, los conductores se encuentran separados entre sí por una lámina que se utiliza para el almacenamiento de las cargas eléctricas.
Un capacitor es un componente pasivo ya que no se encarga de la excitación eléctrica, sino que sirve para conectar componentes activos y conservar la energía. Esto le permite servir de sustento a un campo eléctrico.
Su capacidad se mide en faradios.

Arduino Uno
HW Arduino a Fondo
Los Arduino y en general los microcontroladores tienen puertos de entrada y salida y de comunicación. En Arduino podemos acceder a esos puertos a través de los pines.
- Pines digitales: pueden configurarse como entrada (para leer, sensores) o como salida (para escribir, actuadores)
- Pines analógicos de entrada: , usan un conversor analógico/digital y sirven para leer sensores analógicos como sondas de temperatura.
- Pines analógicos de salida (PWM): la mayoría de Arduino no tienen conversor digital/analógico y para tener salidas analógicas se usa la técnica PWM. No todos los pines digitales soportan PWM.
- Puertos de comunicación: USB, serie, I2C y SPI
Otro aspecto importante es la memoria, Arduino tiene tres tipos de memoria:
- SRAM: donde Arduino crea y manipula las variables cuando se ejecuta. Es un recurso limitado y debemos supervisar su uso para evitar agotarlo.
- EEPROM: memoria no volátil para mantener datos después de un reset o apagado. Las EEPROMs tienen un número limitado de lecturas/escrituras, tener en cuenta a la hora de usarla.
- Flash: Memoria de programa. Usualmente desde 1 Kb a 4 Mb (controladores de familias grandes). Donde se guarda el sketch.
Placa Arduino Uno a fondo:

Especificaciones detalladas de Arduino UNO
| Microcontroller & USB-to-serial converter | ATmega328P & Atmega16U2 |
| Operating Voltage | 5V |
| Input Voltage (recommended) | 7-12V |
| Input Voltage (limits) | 6-20V |
| Digital I/O Pins | 14 (of which 6 provide PWM output) |
| Analog Input Pins | 6 |
| DC Current per I/O Pin | 40 mA |
| DC Current for 3.3V Pin | 50 mA |
| Flash Memory | 32 KB (ATmega328) of which 0.5 KB used by bootloader |
| SRAM | 2 KB (ATmega328) |
| EEPROM | 1 KB (ATmega328) |
| Clock Speed | 16 MHz |
Veamos todos los componentes del Arduino UNO:

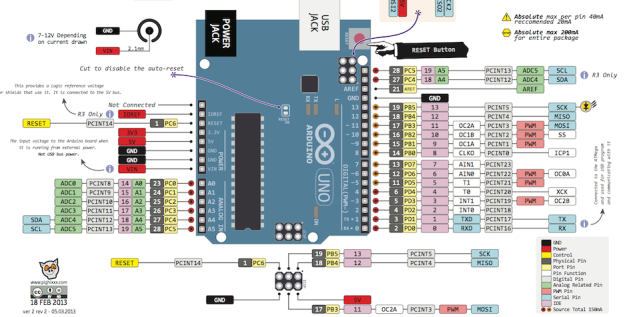
Pin mapping Arduino UNO:
Componentes en la placa:

Componentes:
- No necesita de un cable FTDI para conectarse al MCU, en su lugar uso una MCU ATMEGA16U2 especialmente programado para trabajar como conversor de USB a serie.
- Alimentación: vía USB, batería o adaptador AC/DC a 5V, seleccionado automáticamente. Arduino puede trabajar entre 6 y 20V, pero es recomendado trabajar entre 7 y 12V por las características del regulador de tensión.
- Puerto Serie en los pines 0 y 1.
- Interrupciones externas en los pines 2 y 3.
- Built-in LED en el pin 13.
- Bus TWI o I2C en los pines A4 y A5 etiquetados como SDA y SCL o pines específicos
- El MCU ATmega328P tiene un bootloader precargado que permite cargar en la memoria flash el nuevo programa o sketch sin necesidad de un HW externo.
- Fusible rearmable de intensidad máxima 500mA. Aunque la mayoría de pc’s ya ofrecen protección interna se incorpora un fusible con la intención de proteger tanto la placa Arduino como el bus USB de sobrecargas y cortocircuitos. Si circula una intensidad mayor a 500mA por el bus USB(Intensidad máxima de funcionamiento), el fusible salta rompiendo la conexión de la alimentación.
- Regulador de voltaje LP2985 de 5V a 3.3V que proporciona una corriente de alimentación máxima de 150 mA.
- Regulador de voltaje NCP1117 que proporciona un valor estable de 5V a la placa y soporta por encima de 1 A de corriente.
- ATMEGA16U2 => Es el chip encargado de convertir la comunicación del puerto USB a serie.
- Condensadores de 47µF de capacidad
- Diodo M7 en la entrada de alimentación de la placa. Con este diodo conseguimos establecer el sentido de circulación de la intensidad, de esta forma si se produce una contracorriente debido a la apertura de un relé u otros mecanismos eléctricos, el diodo bloquea dicha corriente impidiendo que afecte a la fuente de alimentación.
- DFU-ICSP. Puerto ICSP para el microcontrolador ATMEGA16U2, como en el caso del ATMEGA328P-PU se emplea para comunicarnos con el microcontrolador por el serial, para reflashearlo con el bootloader, hacer algunas modificaciones, ponerlo en modo DFU, etc..
- JP2. Pines libres del ATMEGA16U2, dos entradas y dos salidas para futuras ampliaciones.
- Encapsulados de resistencias.
- RESET-EN: Significa Reset enabled o reset habilitado. Está habilitado el auto-reset, para deshabilitar por cualquier tipo de seguridad (por ejemplo un proyecto que tenemos funcionando y no queremos que nadie lo reinicie al conectar un USB y detecte un stream de datos) debemos desoldar los pads RESET-EN y limpiarlos de forma que estén aislados el uno del otro.
- Cristal oscilador de 16MHz necesario para el funcionamiento del reloj del microcontrolador ATMEGA16U2.
- Resonador cerámico de 16 Mhz para el microcontrolador ATMEGA328P-PU. Los resonadores cerámicos son menos precisos que los cristales osciladores, pero para el caso hace perfectamente la función y ahorramos bastante espacio en la placa. Se trata del pequeño, porque el cristal grande es para el 16U2
Diferencias entre las diversas versiones de HW
Esquemático Arduino UNO
En este pdf podemos ver el esquema de un Arduino UNO, muy importante conocerlo para evitar hacer maniobras que lo dañen:
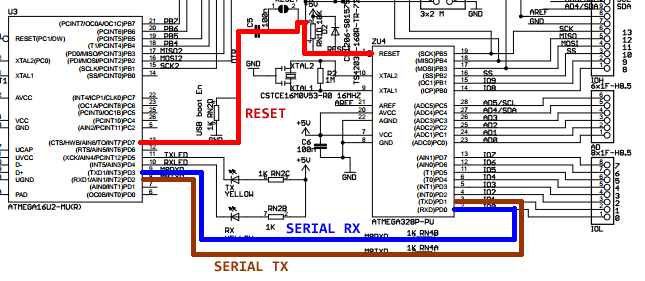
Los dos microcontroladores:

Partes del esquemático:

Conexión de los puertos serie de loas os MCUs de un Arduino UNO
También es importante conocer cómo están distribuidos los pines del MCU en Arduino:
Para saber todo sobre el HW de Arduino ver este tutorial donde desglosa todo el HW de Arduino para construir un Arduino UNO desde cero y crear tu propio clon.
Diseño PCB Arduino
La placa de Arduino:

Microcontroladores Arduino
Un microcontrolador es un integrado capaz de ser programado desde un ordenador y seguir la secuencia programada.
Arduino es una plataforma para programar de forma sencilla algunos microcontroladores de la familia AVR de Atmel y también microcontroladores Atmel ARM Cortex-M0+, Intel
Pero también Arduino y su entorno de programación se está convirtiendo en un estándar de facto para la programación de cualquier tipo de placas de desarrollo y prototipado, es decir, de otro tipo de microcontroladores no incluidos en los productos de Arduino.
Puesto que Arduino es una plataforma open source disponemos de toda la documentación de los microcontroladores usados.
Cuando el microcontrolador ejecuta una instrucción que definimos en el sketch, internamente hace muchas operaciones y cada una de esas operaciones se ejecuta en un ciclo de reloj. Para el ATmega 328p que tiene una frecuencia de 16 MHz, es decir, cada ciclo tarda 0,0000000625 segundos = 0,0625 microsegundos = 62,5 nanosegundos

Así se ejecutaría una instrucción, en cada ciclo de reloj se ejecuta cada subinstrucción.
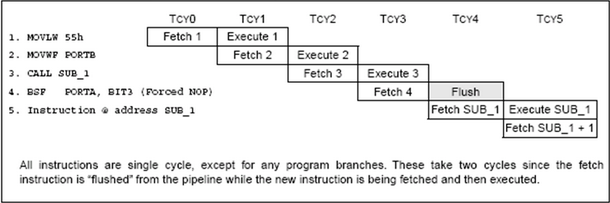
La importancia de conocer el ciclo de ejecución de instrucciones en un micro controlador estriba en que en ocasiones es necesario calcular de forma precisa el tiempo de ejecución de los bucles para actuar en tiempo real.
My own Juego de Scratch
Hola seguidores de mi blog. Esta entrada está para explicaros mi juego proyecto de tics.
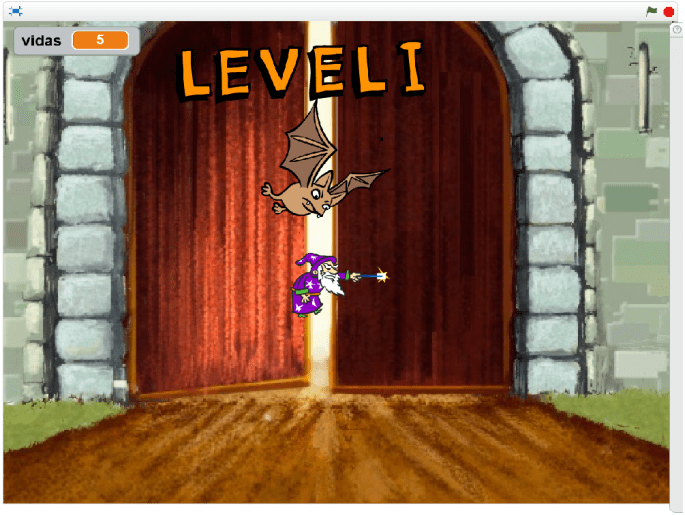
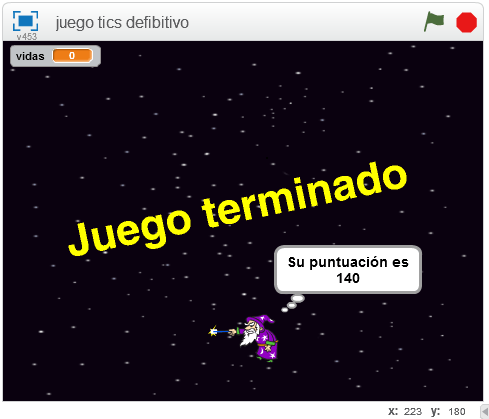
El juego consiste en un mago (el del centro), que ha de dispara a un murciélago; y a una cucaracha en el segundo y cuarto nivel (en estos dos niveles se dispara a murciélago y cucaracha) . Existen cuatro niveles, para llegar al cuarto hay que matar a los bichos un numero determinado de veces. Para estos tres niveles se tienen cinco vidas, que se pierden si el murciélago o la cucaracha te toca. En el cuarto nivel, existe la posibilidad de aumentar las vidas «comiendo las tartas» que aparecen en el nivel. El juego acaba cuando te quedas sin vidas. Obviamente, está pensado para que en cada nivel aumente el nivel de dificultad. Al quedarnos sin vidas, el mago nos descubrirá la puntuación final que se ha conseguido.
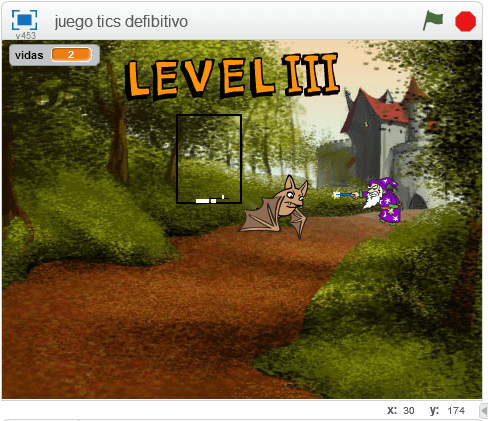
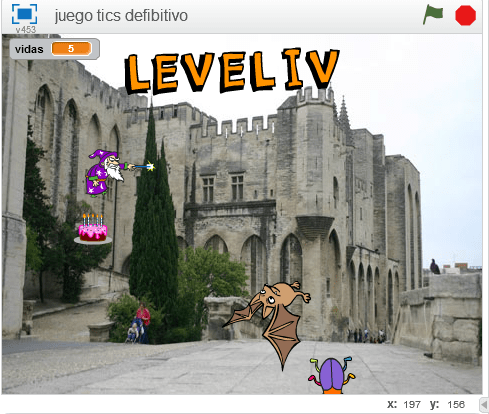
Estos son los distintos niveles:

En este nivel el murciélago va mucho más rápido.
Cuando se acaban las vidas, el mago finalmente te dice tu puntuación. Cada murciélago o cucaracha muertos suma 10 puntos a la puntuación.
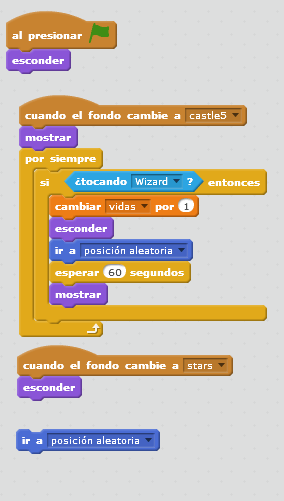
Vamos con las programaciones

El movimiento se basa en 5 condiciones, al mover cada flecha se mueve en dicha dirección, y al presionar la tecla espacio se dispara. Además, al tocar el murciélago o la cucaracha se pierde una vida. Por otra parte, al alcanzar sucesivas puntuaciones se cambia al siguiente nivel, y al acabar las vidas se termina el juego.
Programación del murciélago
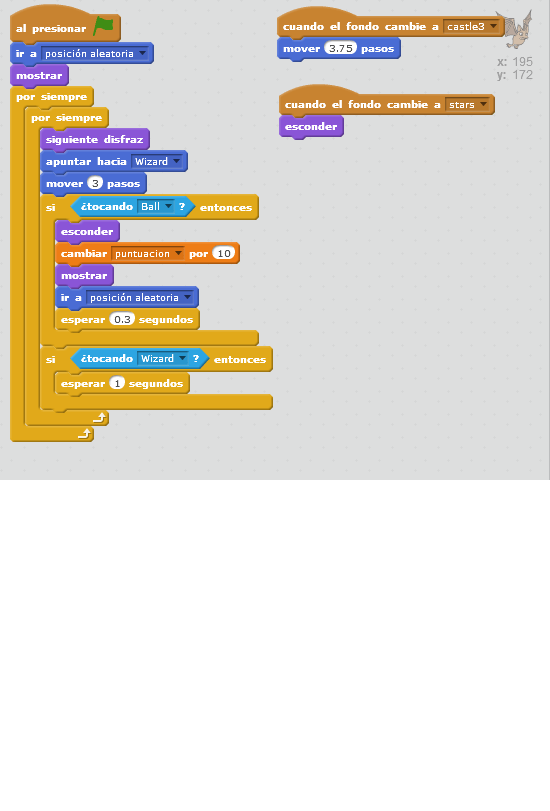
La programación del murciélago tiene de especial que al desaparecer aumenta la puntuación, y que al cambiar de fondo se mueve más rápido.
Programación del escarabajo
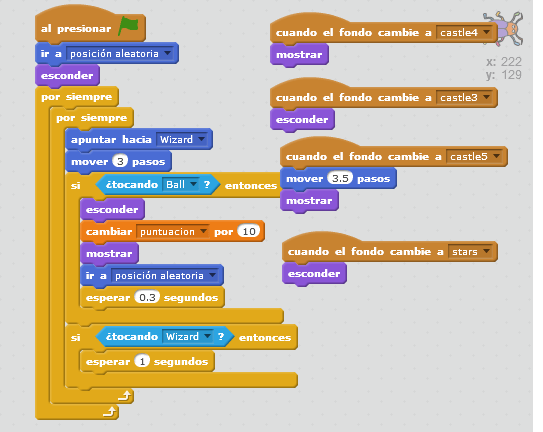
La programación del escarabajo es muy parecida a la del murciélago.
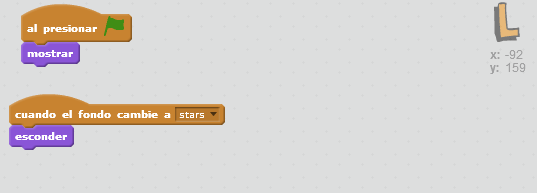
Programación de la pelota (lo que se dispara)
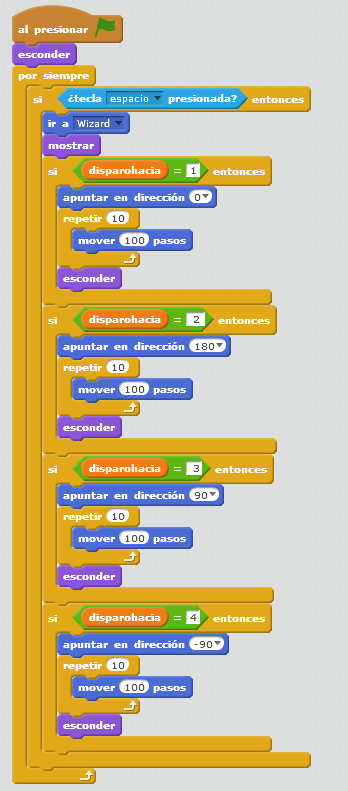
Se fijan cuatro variables, cada una en cada dirección de disparo. Al presionar la tecla espacio va al mago para ser disparado.
Programación tarta
La tarta aparece en el fondo final. Cuando el mago la toca, se aumenta una vida y va a una posición aleatoria.
Programación de una letra
Y básicamente, hasta aquí ha llegado todo.
Kristian Pielhoff: CONTIGO EMPEZÓ TODO
Desde este blog, se le quiere rendir un homenaje al difusor principal de la ciencia española, y su programa, Bricomanía.
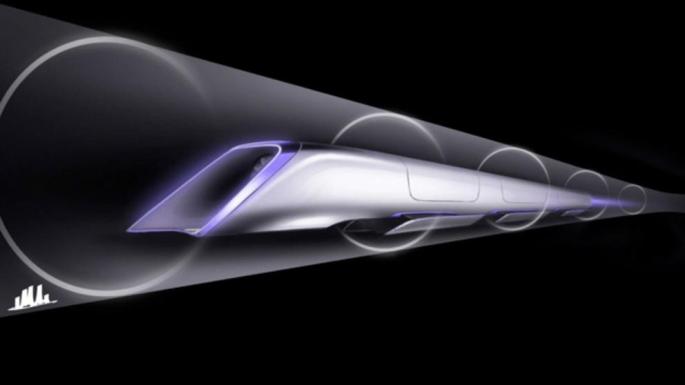
Científicos españoles desarrollan un tren más rápido que el avión
Un equipo de más de 30 universitarios trabaja en el prototipo ‘Hyperloop UPV’ que llevaría pasajeros y mercancías sin raíles y alcanzaría una velocidad de hasta 1.000km/h

http://www.quo.es/tecnologia/el-tren-subsonico-del-futuro-en-manos-de-cinco-estudiantes-espanoles
http://www.lavanguardia.com/local/valencia/20161215/412643959932/upv-tren-futuro-hyperloop.html
Nuevos elementos en la tabla periódica
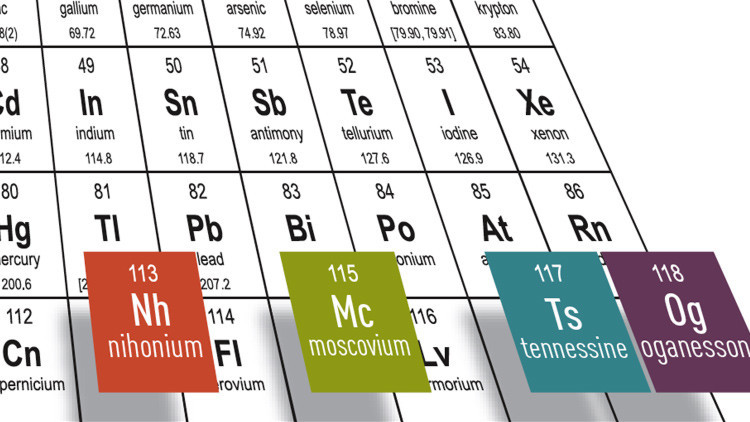
Cuatro nuevos elementos descubiertos en la tabla periódica.
El futuro vehículo

Nuevos vehículos voladores están siendo desarrollados por diversas empresas en el panorama mundial.

Debe estar conectado para enviar un comentario.